
Researchers at the University of Illinois have developed a biological microrobot, which moves when its muscle are actuated by the electrical impulses. It can be used in many biomedical engineering applications.
Professor Rashid Bashir leads a biorobotic research team at Libnah laboratory (Laboratory of Integrated Bio Medical Micro/Nanotechnology & Applications ). Which has developed a microrobot with the size of less than a centimeter and is printed in 3D using a mixture of hydrogel and living cells. This mini robot is driven by a group of skeletal muscle cells stimulated by an electrical impulse. The structure is inspired by the bone-tendon-muscle architecture that we find in vertebrates. Thats why they are called Bio-Bots.
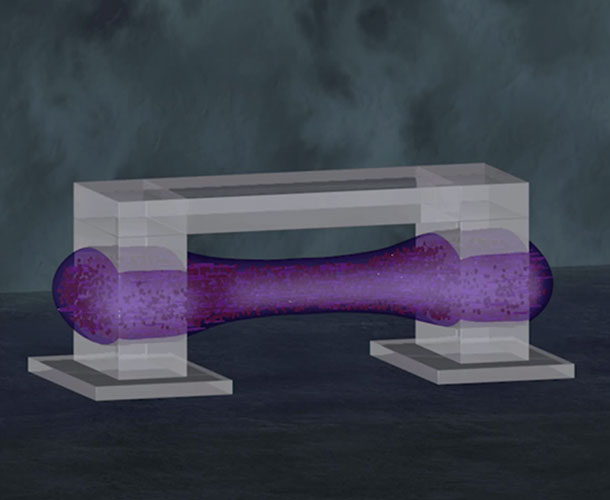
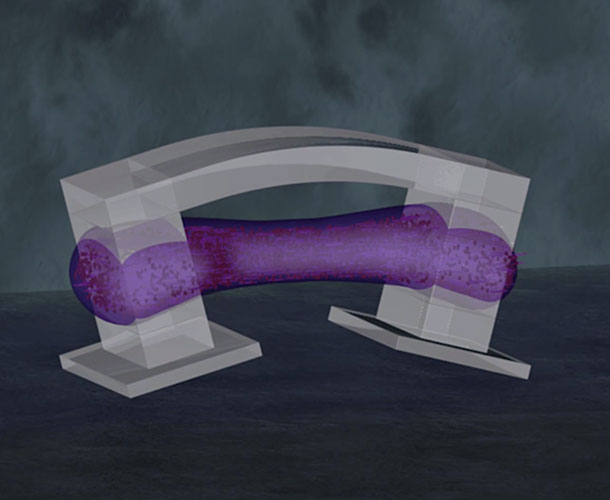
This muscular structure in the form of an inverted U which is both rigid and flexible, and printed in 3D. The hydrogel provides some rigidity to the structure but also flexible enough to allow it to bend such as in the case of joints. The artificial muscle connects the two pillar structures acting as tendons.
[youtube]http://www.youtube.com/watch?v=skCzl7FlM34[/youtube]
The moving speed of the robot can be controlled by adjusting the frequency of the electrical pulses given to the muscle. The higher the frequency, the more the muscle contracts rapidly and the robot moves quickly. According to Caroline Cvetkovic, who is a student working on the project, this can usher into a new era of biological machines which can have diverse applications like surgery, intelligent implants, administration of drugs etc.
The scientific team is seeking better control of the movements of the biorobot and will try to incorporate parallel neurons to control it from a source of light or chemical reactions. With 3D printing, engineers can quickly test different solutions. According to the Professor Bashir their final goal is to devise a robot with autonomous sensors that can detect toxic chemical and release other chemicals to neutralize them. The movement control with muscles is the first but very important step in this direction.