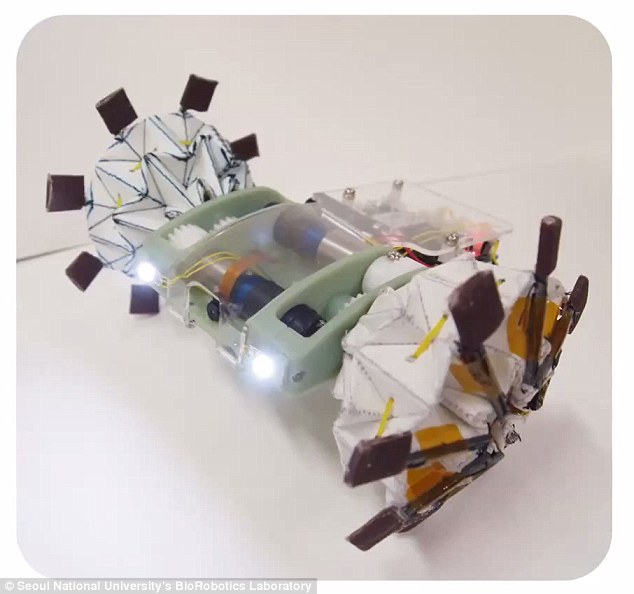
South Korean researchers have designed an origami inspired robot. Which can change the size of its wheel according to the obstacle and load. The purpose is to optimize both speed and power. The wheel design is based upon the traditional paper folding technique named as ‘Magic Ball Pattern’.
Origami is the famous Japanese art of folding paper into sculpture. The application of origami ideas to the concepts of modern robotics has led to the invention of a wonderful robot. The origami inspired robot consists of two wheel which can change their shape, as well as, climb up the stairs. Seoul University’s roboticists are behind this innovation. More precisely, the conception of the robotic wheel is based upon Origami paper folding technique named as ‘Magic Ball Pattern’. The wheel can change its radius based on the size of objects it is going to climb over. It can squeeze or increase its radius accordingly. The work has been presented in IEEE International Conference on Robotics and Automation.
The robotic wheel has been created by the Professor Kyu-Jin Cho who told how the wheel is able to squeeze or expand its radius. He told that the wheel can squeeze and expand to the radius of 2 and 4 inches respectively. Each wheel is equipped with only one actuator only and the sensors outside the wheel calculate where the obstacle actually is. The origami wheel has been developed at the Harvard Microrobotics Lab Seoul University, Korea.

The basic idea was to design a robot that could perform variable automatic transitions like the gearbox should change the gear ratios to change the speed, force or torque of the machine automatically. The main aim was to devise a robot that is equally powerful and speedy. The issue with the contemporary robots is that the robot is either speedy or powerful but not both. This new robot comes with both these characteristics. It can decide how much it needs to squeeze or expand to have required speed and torque. This automatically allows the robotic wheel to climb the obstacles quickly and swiftly.
Well, in case of very heavy loads on the wheels, there is no need to adjust them as they stall. In other cases, with the changing loads the wheel radius automatically increases or decreases to provide the necessary torque. The researchers see the use of this robot in the interplanetary rovers which could fold themselves according to the terrain conditions.